Stereoscopic PIV
Erfan Hamdi
erfan.hamdi@gmail.com
99209041
Dr. Shafiei
Headlines
Introduction |
Experiment |
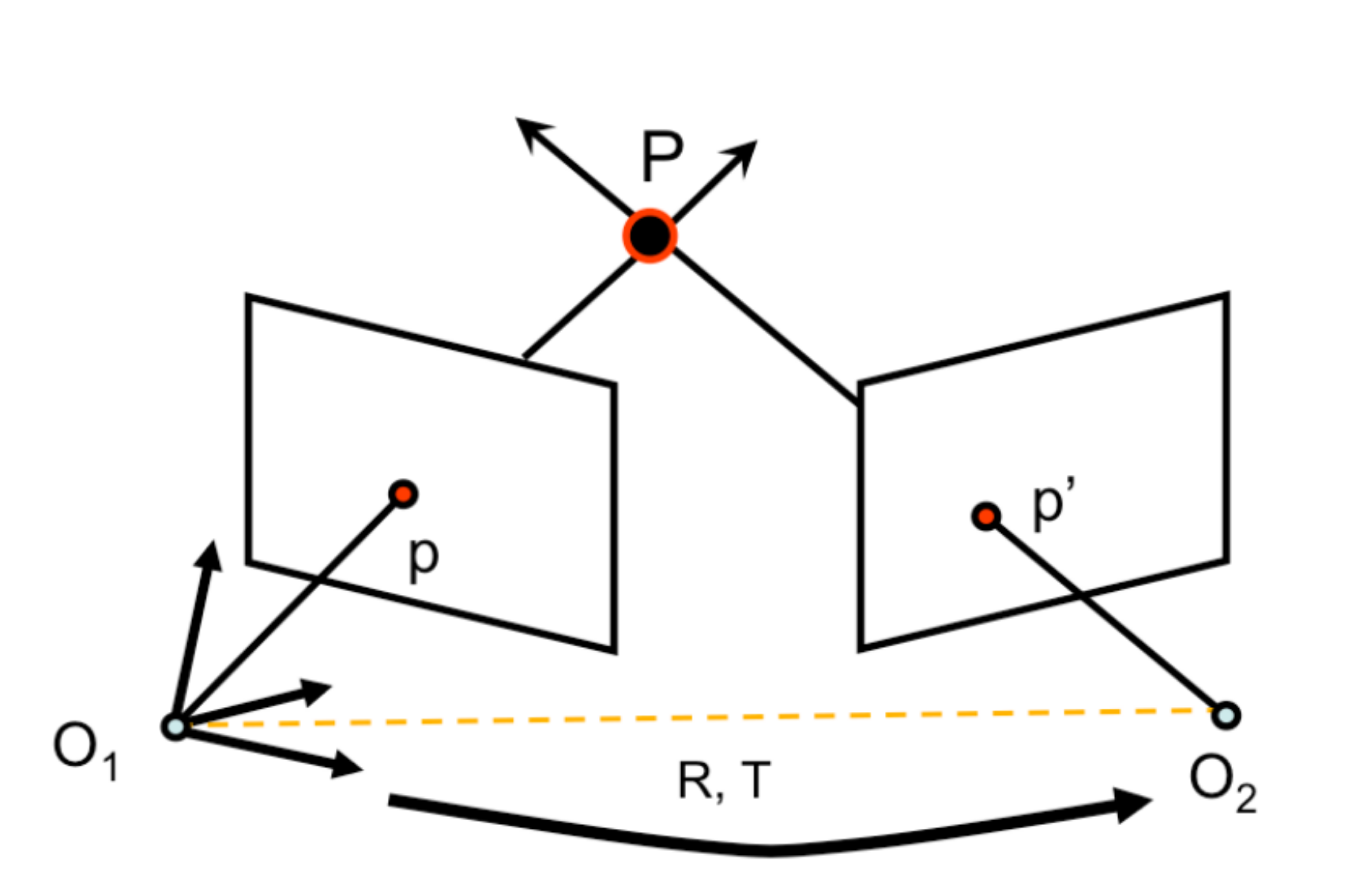
Mutliview Geometry
Applications
- 3D Scene Reconstruction
- Autonomous Driving
- Stereoscopic PIV
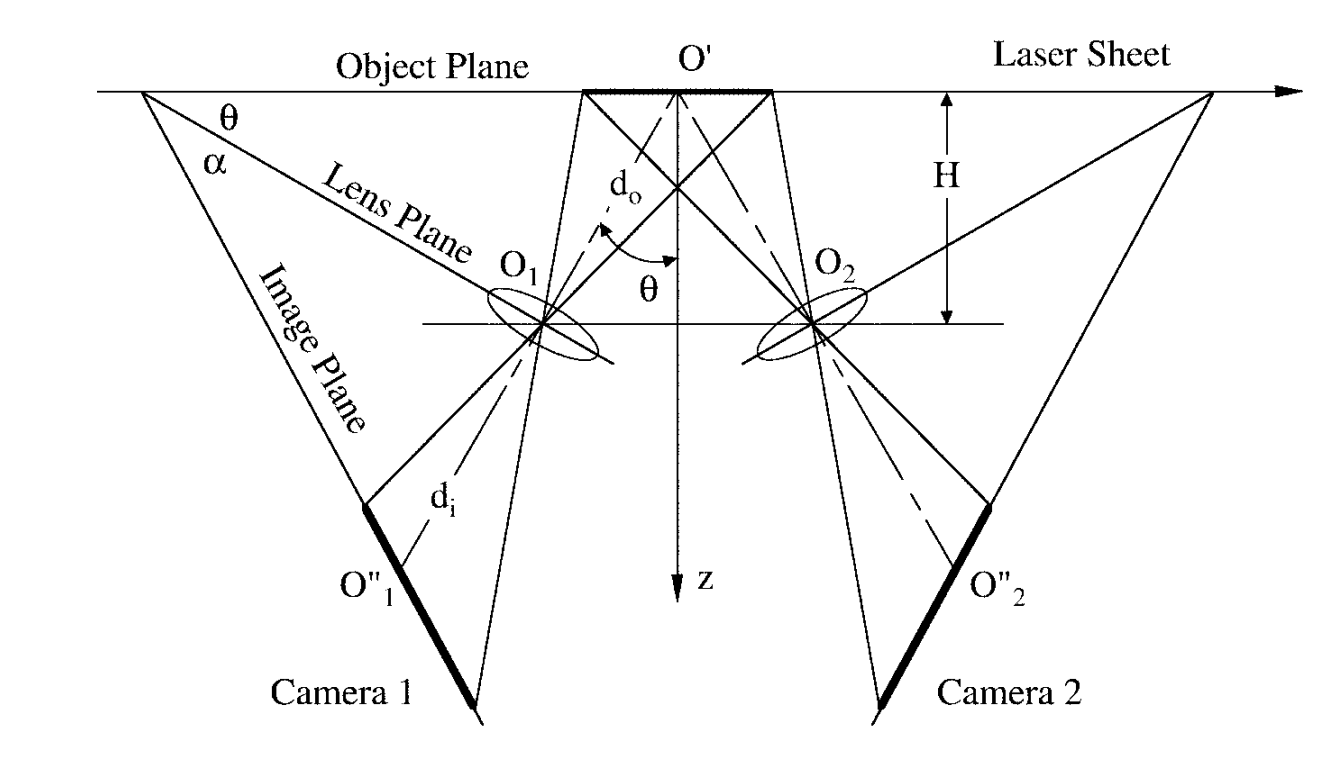
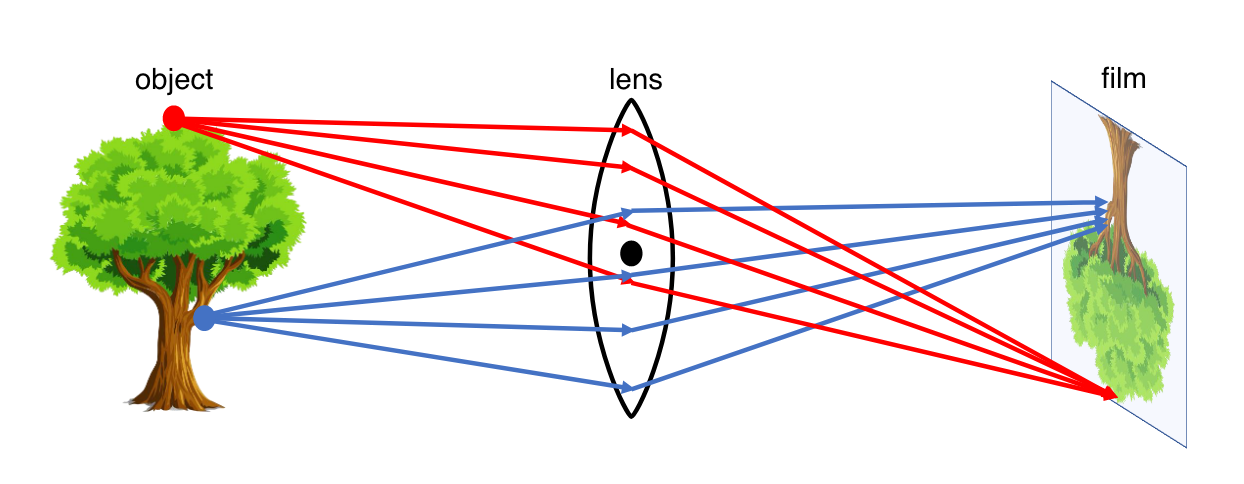
Planes of Interest 🛠
- Object Plane
- Camera Plane
- Image Plane
Camera Pin-hole Model
- Apperture is a small hole
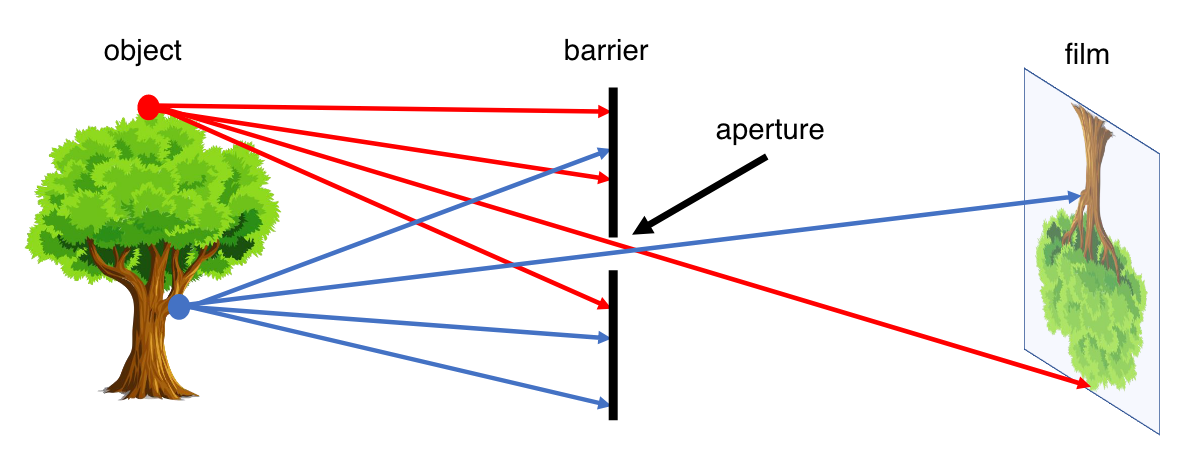
Apperture
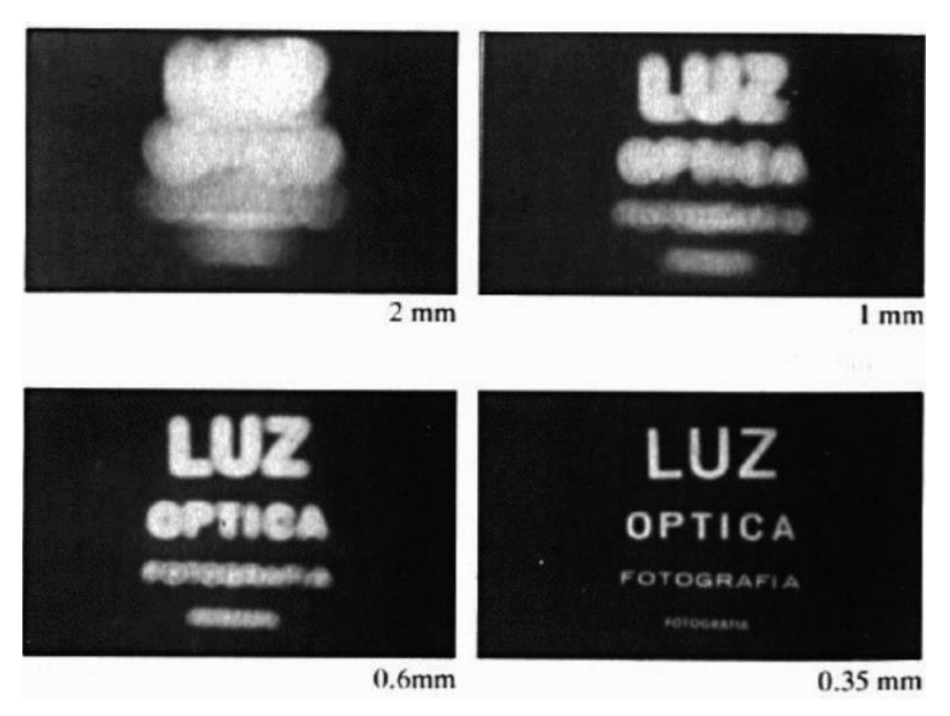
Lens
Camera Extrinsics
\[\begin{equation} \begin{bmatrix} R & T \\ 0 & 1 \\ \end{bmatrix} \end{equation}\]
Camera Intrinsics
\[\begin{equation} \begin{bmatrix} \alpha & -\alpha \cot \theta & c_x\\ 0 & \frac{\beta}{\sin \theta} & c_y\\ 0 & 0 & 1 \\ \end{bmatrix} \end{equation}\]
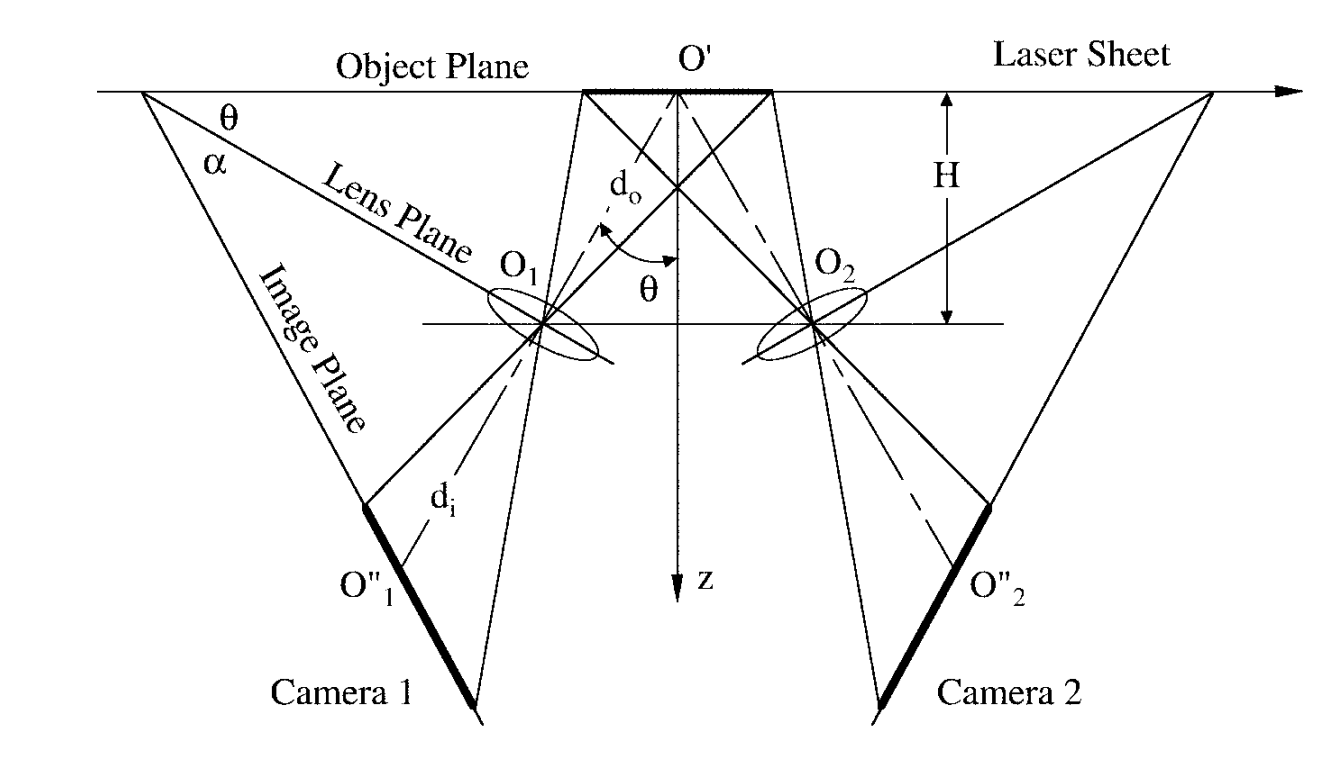
Stereoscopic PIV
ScheimpFlug Principle

ScheimpFlug Principle
ScheimpFlug Principle
Experiment Setup
Translate
Experiment Setup
Rotate
Calibration
- To reconstruct the local displacement vector
- The Correspondence between the image and object space
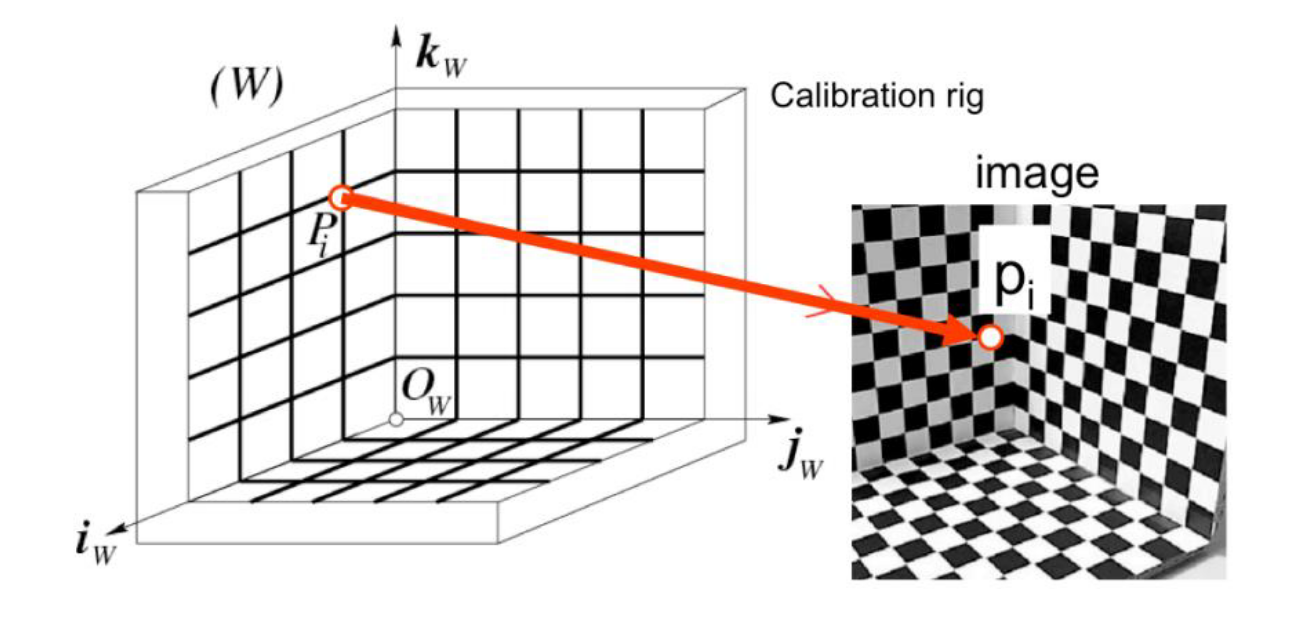
Calibration
\[\begin{aligned} X &= a_0 + a_1 x + a_2 y + a_3 x y + a_4 x^2 + a_5 y^2\\ Y &= b_0 + b_1 x + b_2 y + b_3 x y + b_4 x^2 + b_5 y^2\\ \end{aligned} \]
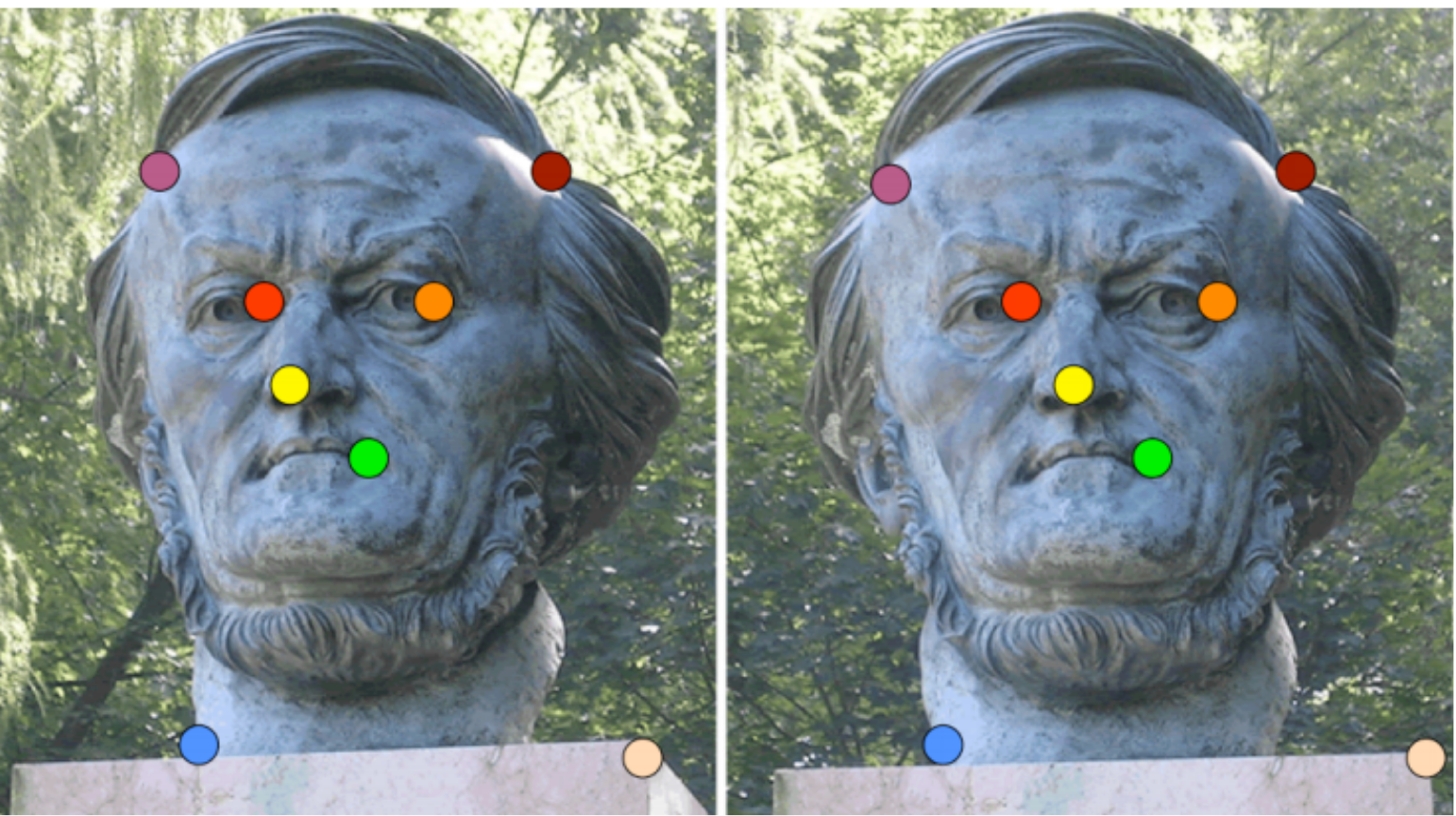
- Solve using SVD
8 Point Algorithm
Literature Review
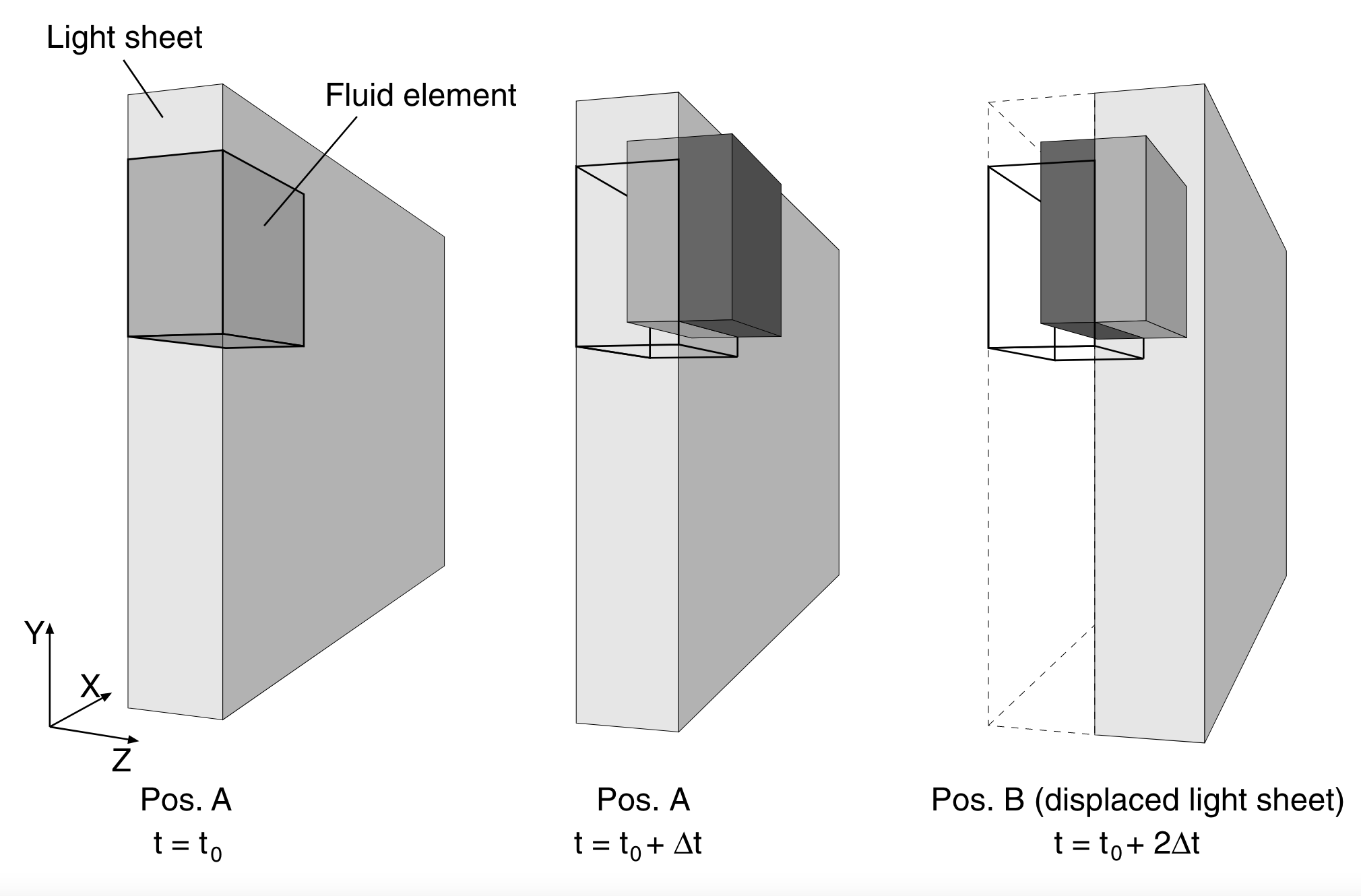
Dual-Plane PIV
- Particle is in the Light sheet
- Particla moves out of plane
- Light sheet moves towards an out of plane direction
- Raffel, Markus, et al. (1996).
Holographic PIV
- Light sheet is expanded into a thick slab.
- Collier, Robert. Optical holography. Elsevier, 2013.
Experiment
Stereoscopic PIV measurements using low‑cost action cameras
Theo Kaufer
Experiments in Fluids
2021
Goal
Reduction of the cost of Stereoscopic PIV experiment.
Equipments
- GoPro Hero 5
- Sensor Size: 1.55um x 1.55um
- 1280x720 @ 240fps
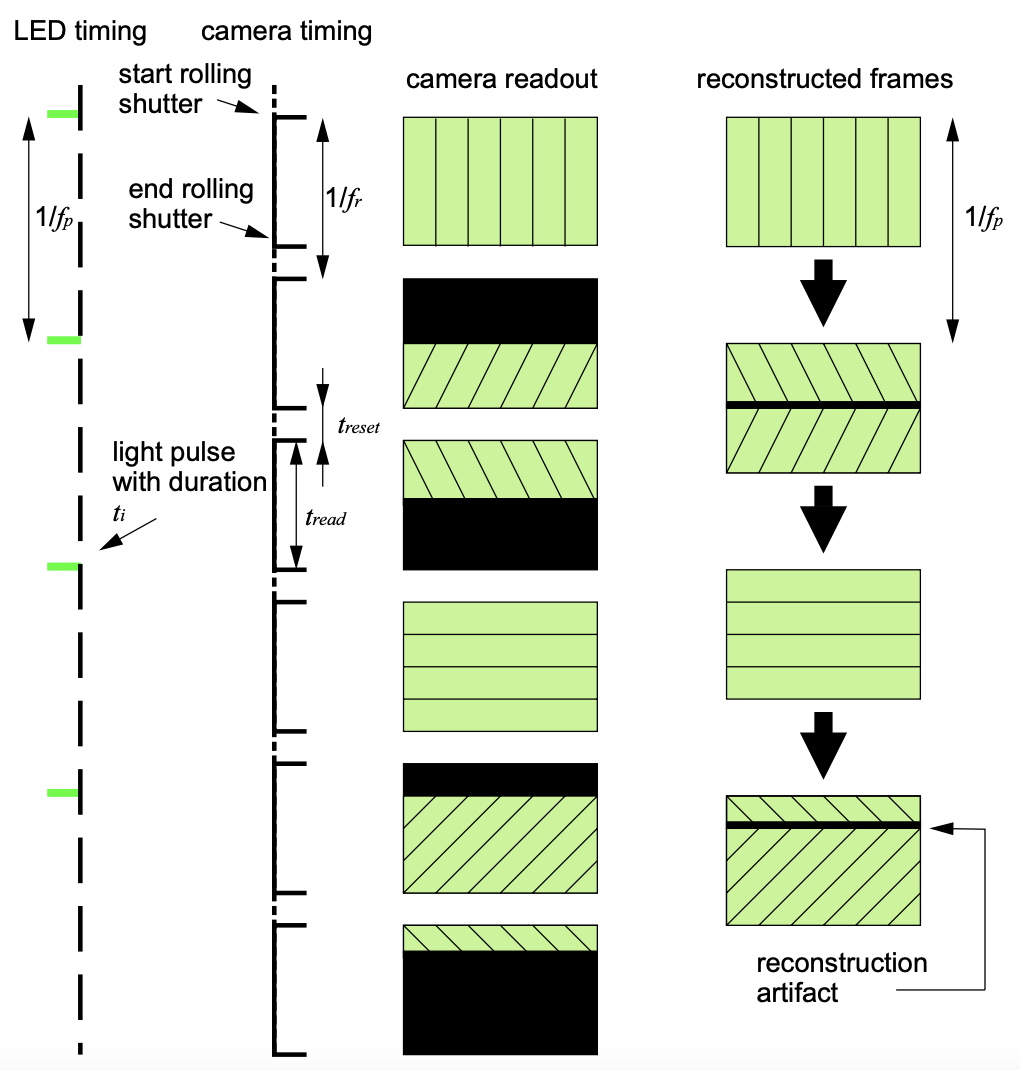
- Rolling Shutter Mechanism

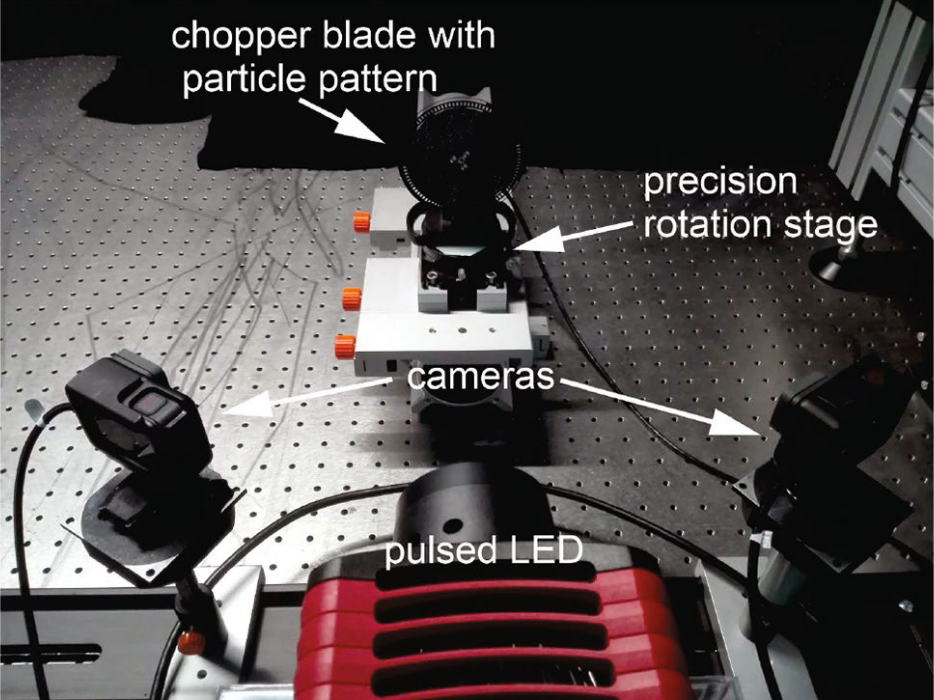
Experiment
- Thorlabs SOLIS-525C
- 211Hz Pulse was Used

Experiment
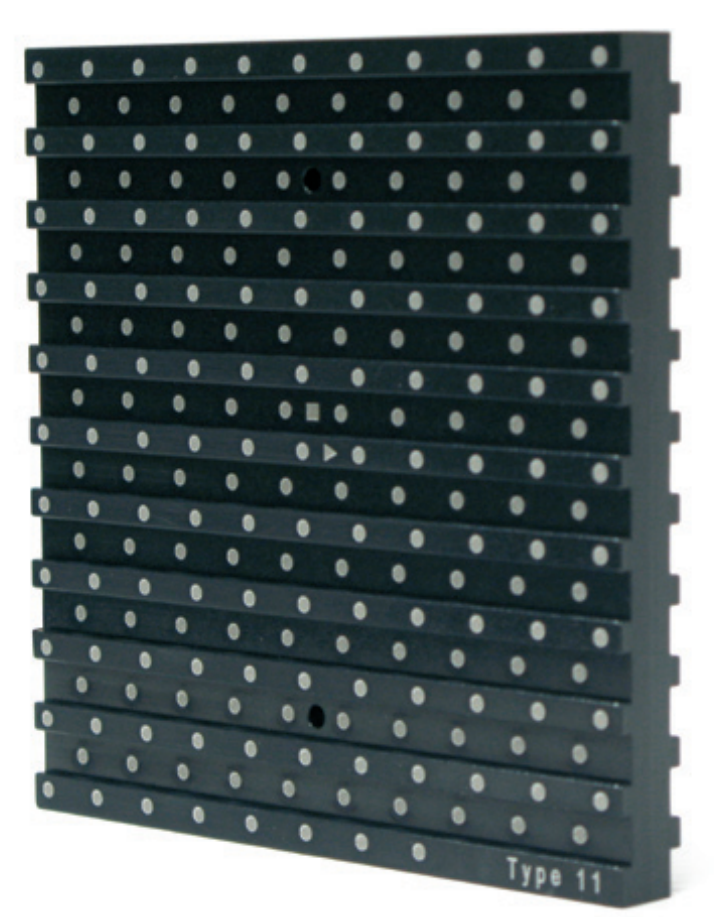
- LaVision Calibration Plane GMBH-204-15
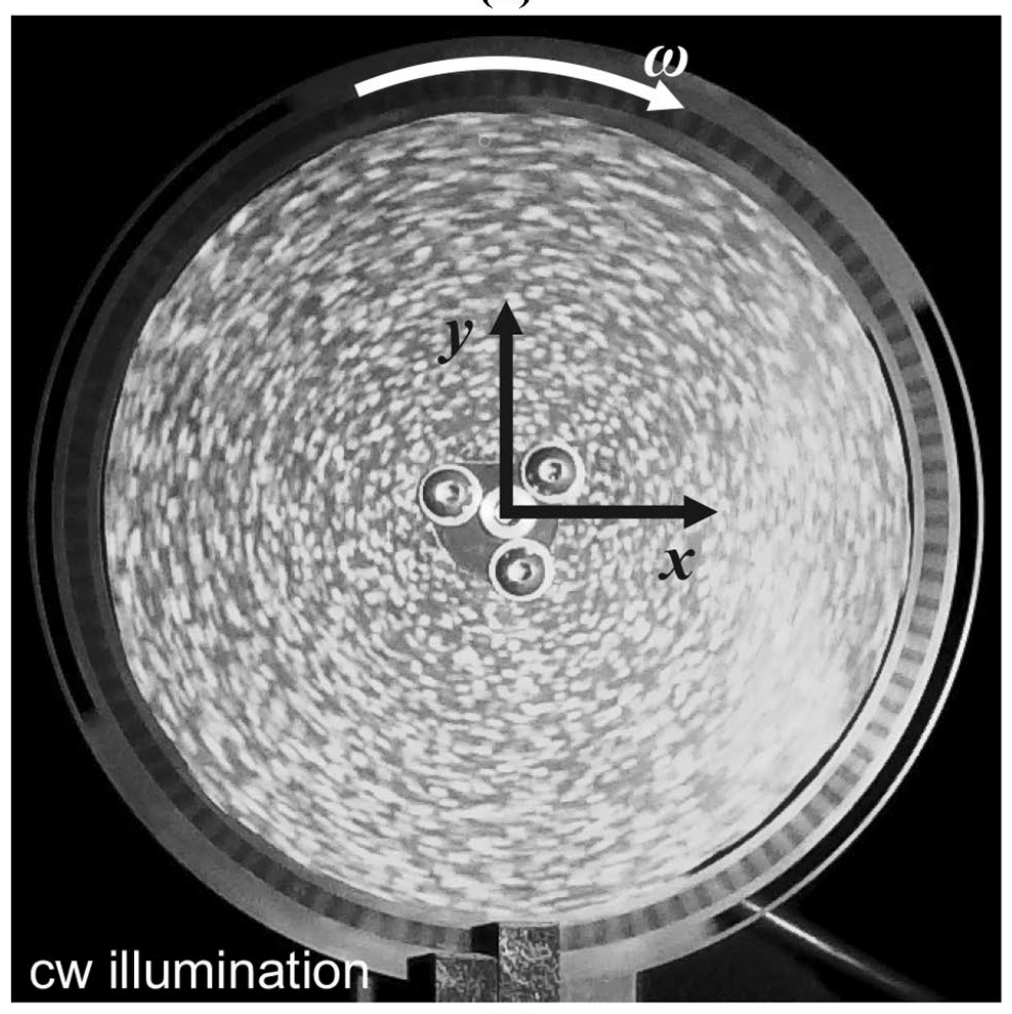
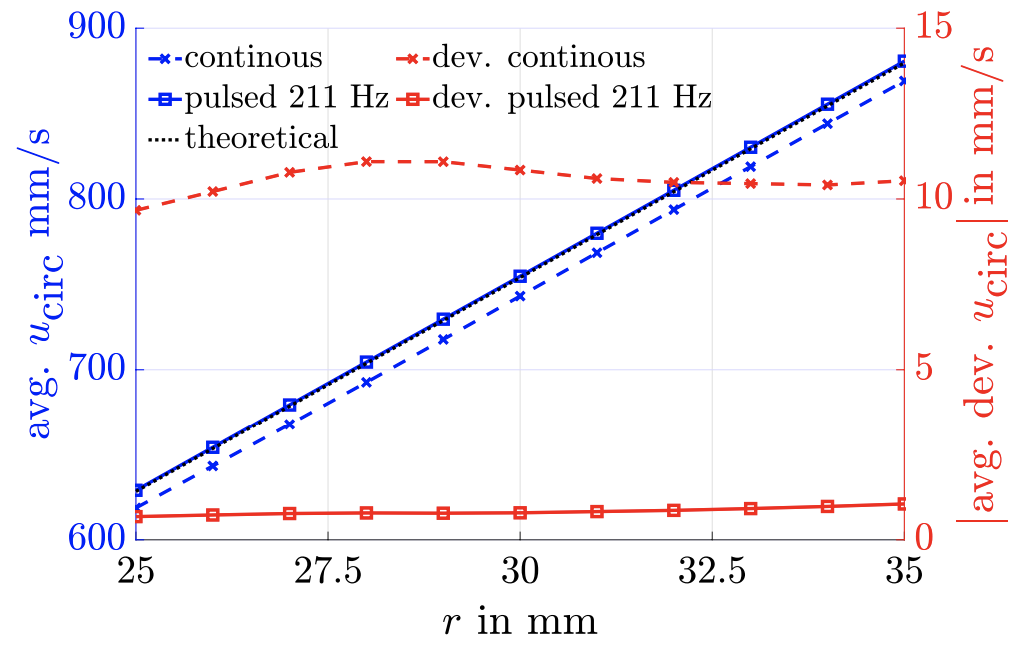
Exp1: Planar PIV
- Planar PIV using 1 Camera
- Pulse and Continuous Wave Lighting
- 128pxx128px interrogation window for first pass
- 50% overlap
- 24x24px interrogation for final pass
- 75% overlap
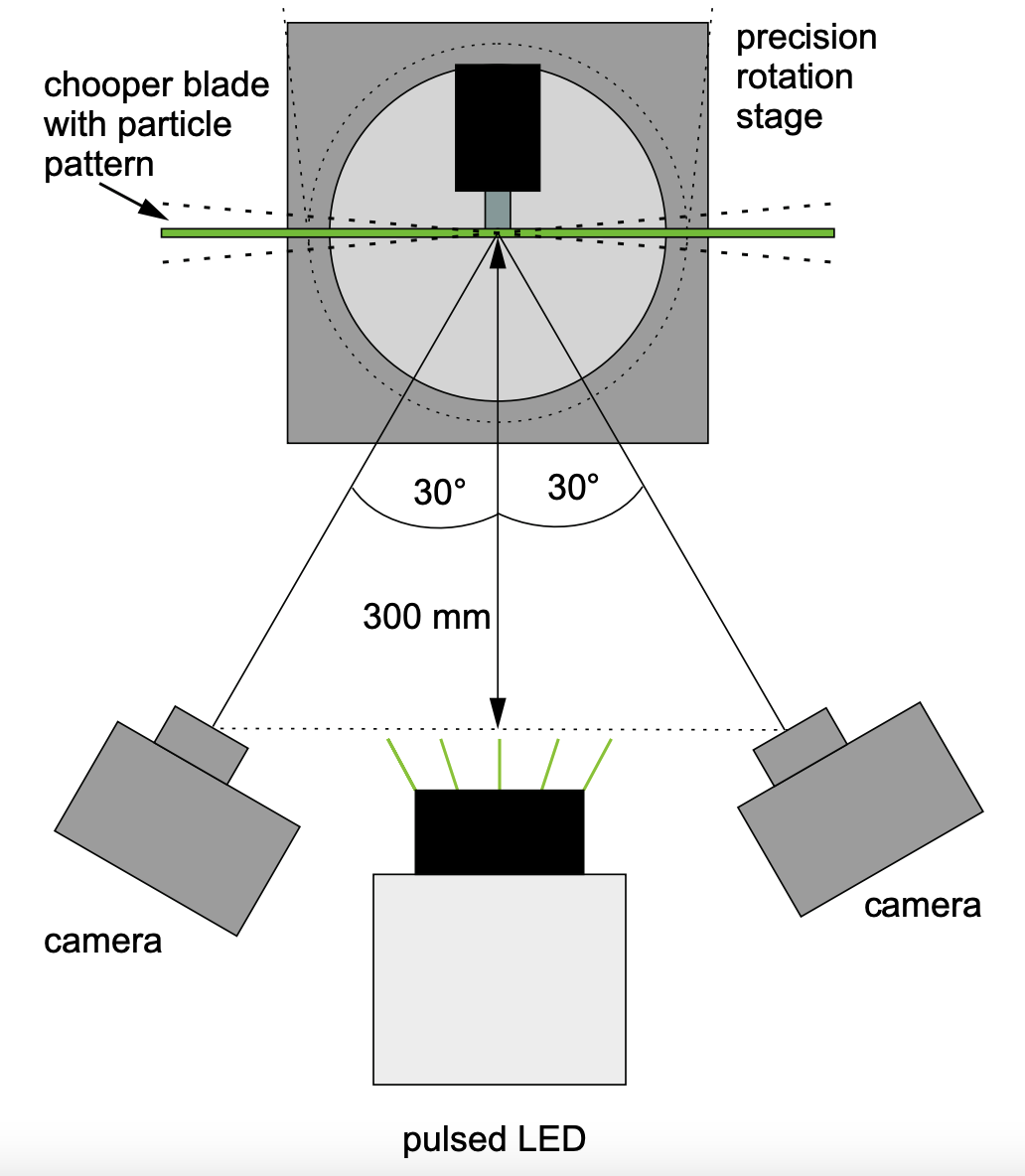
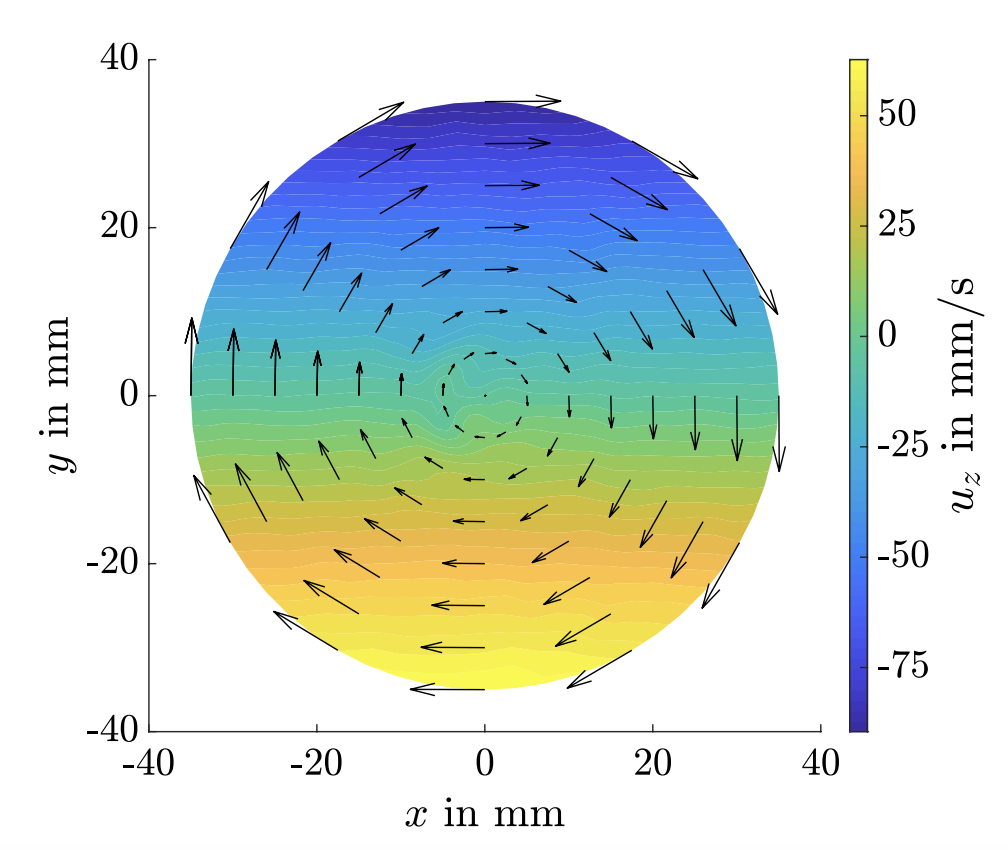
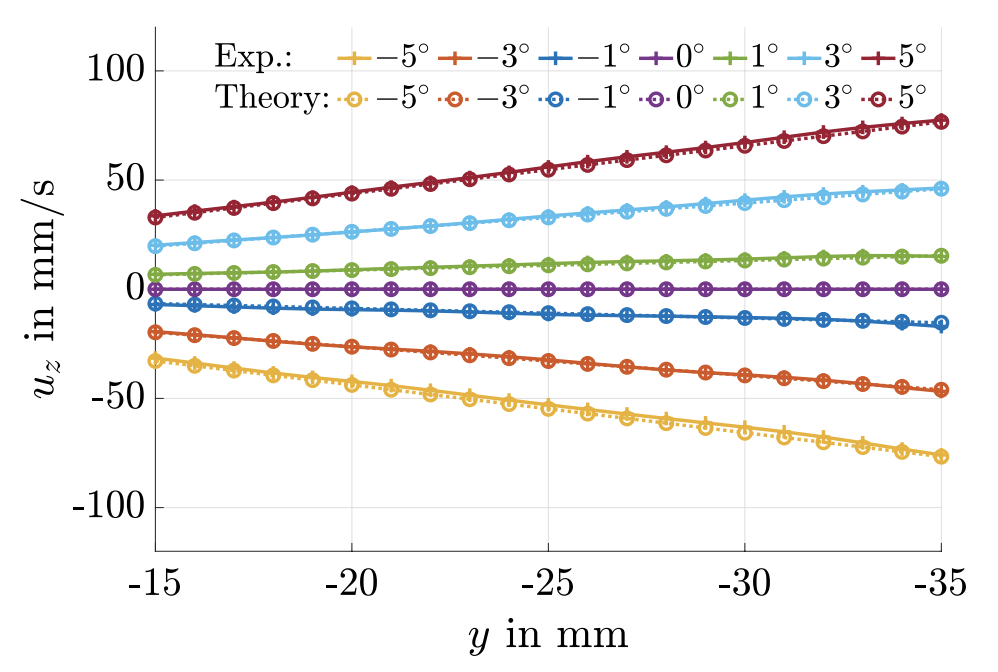
Exp2: Stereoscopic PIV with plane tilt
- Rotating disk can now tilt about z axis
- Two cameras are in 30 degrees angle
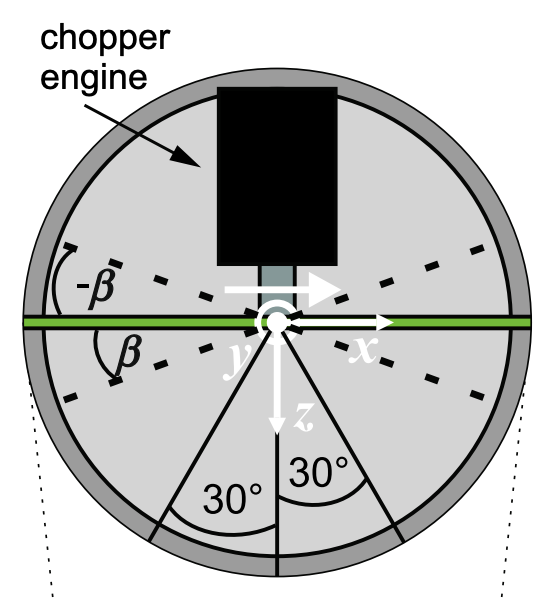
- Experiment setup
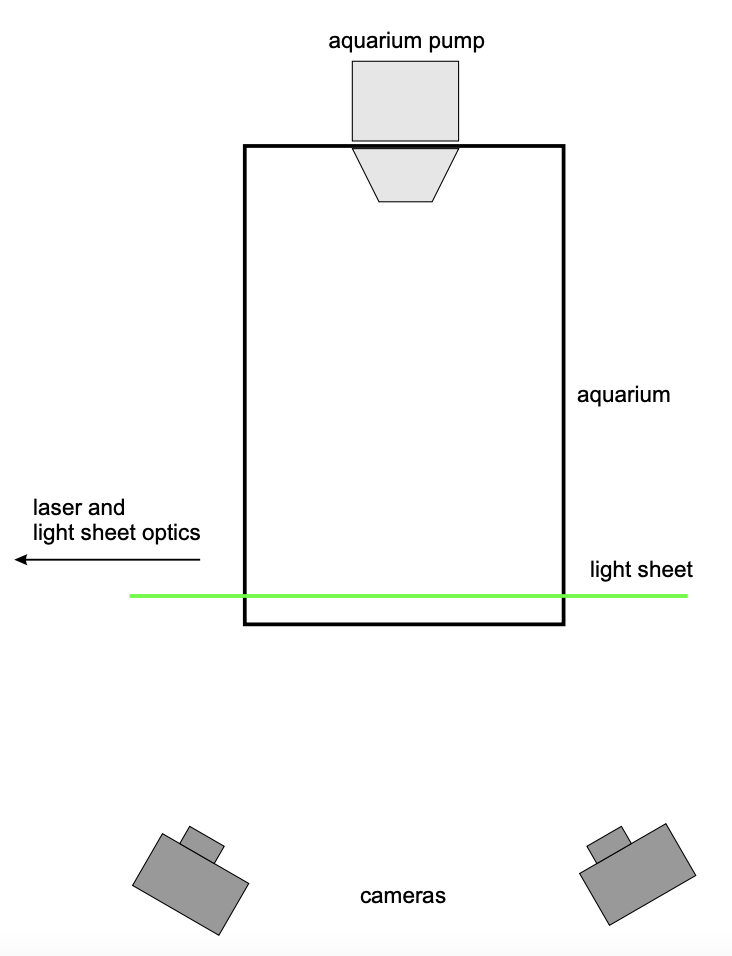
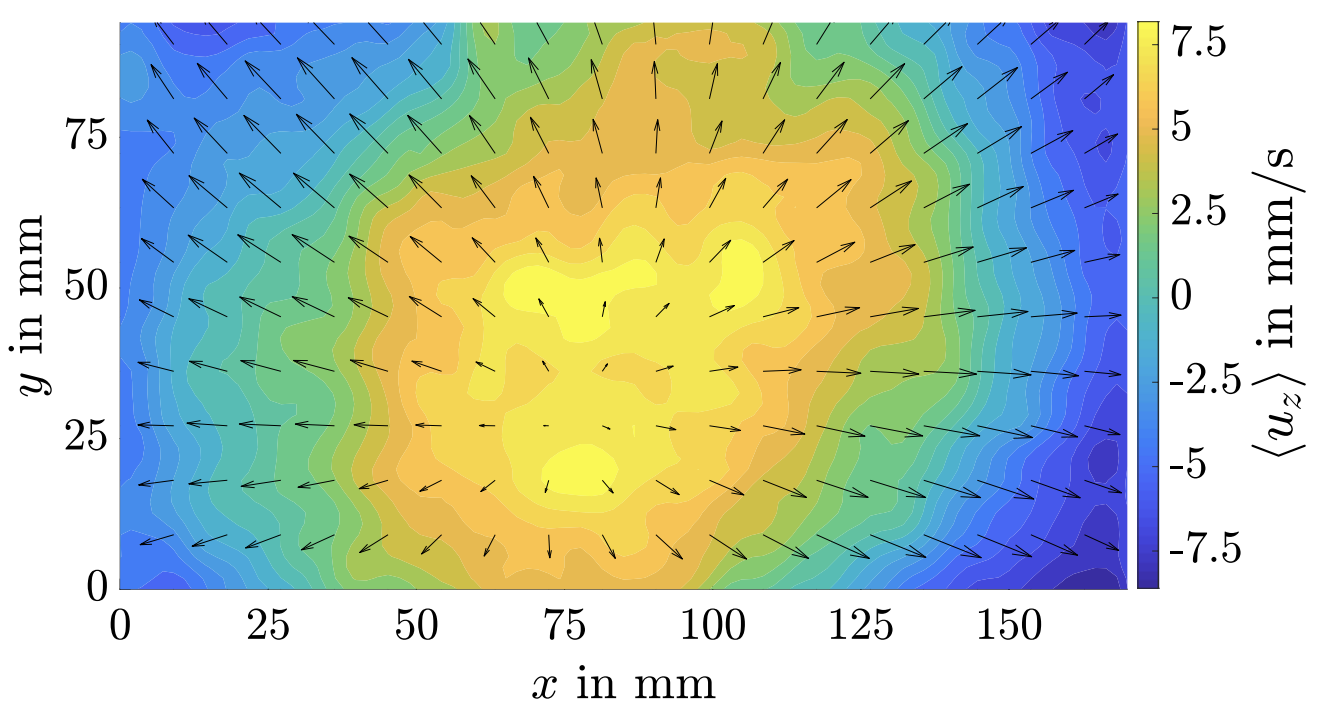
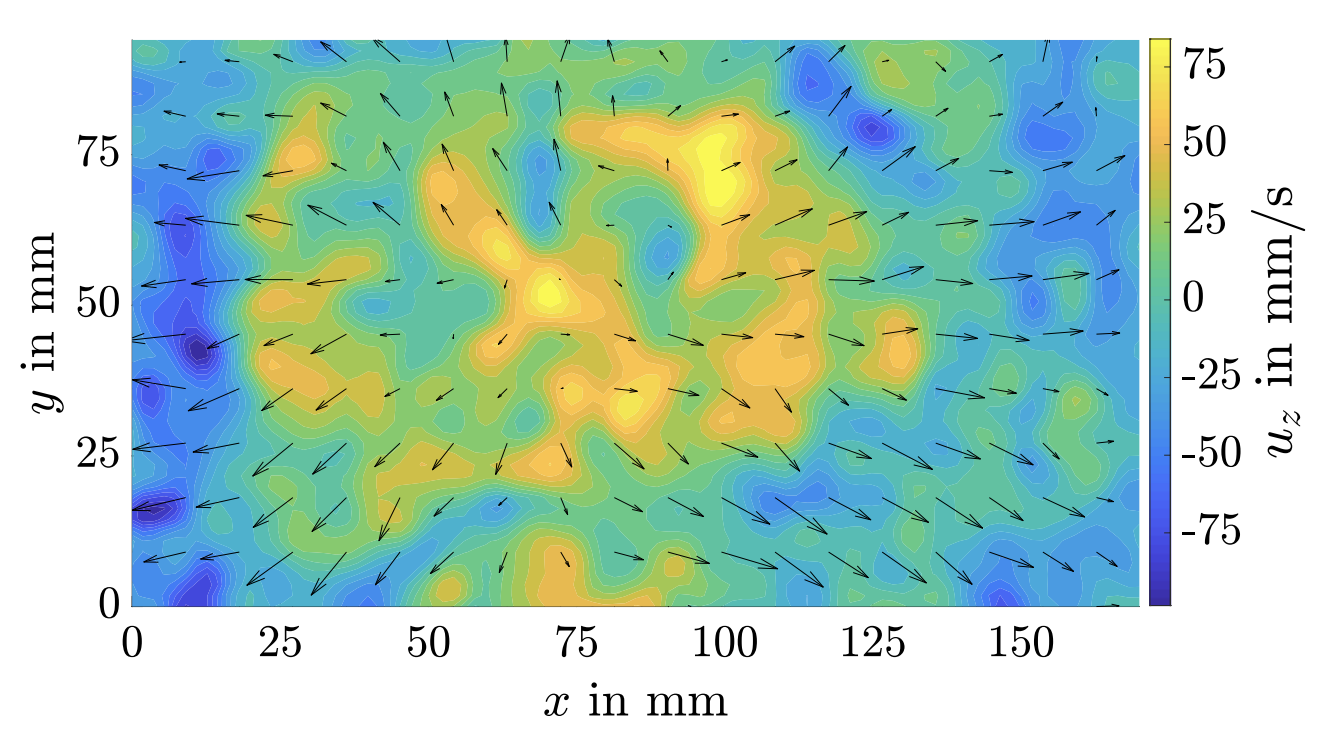
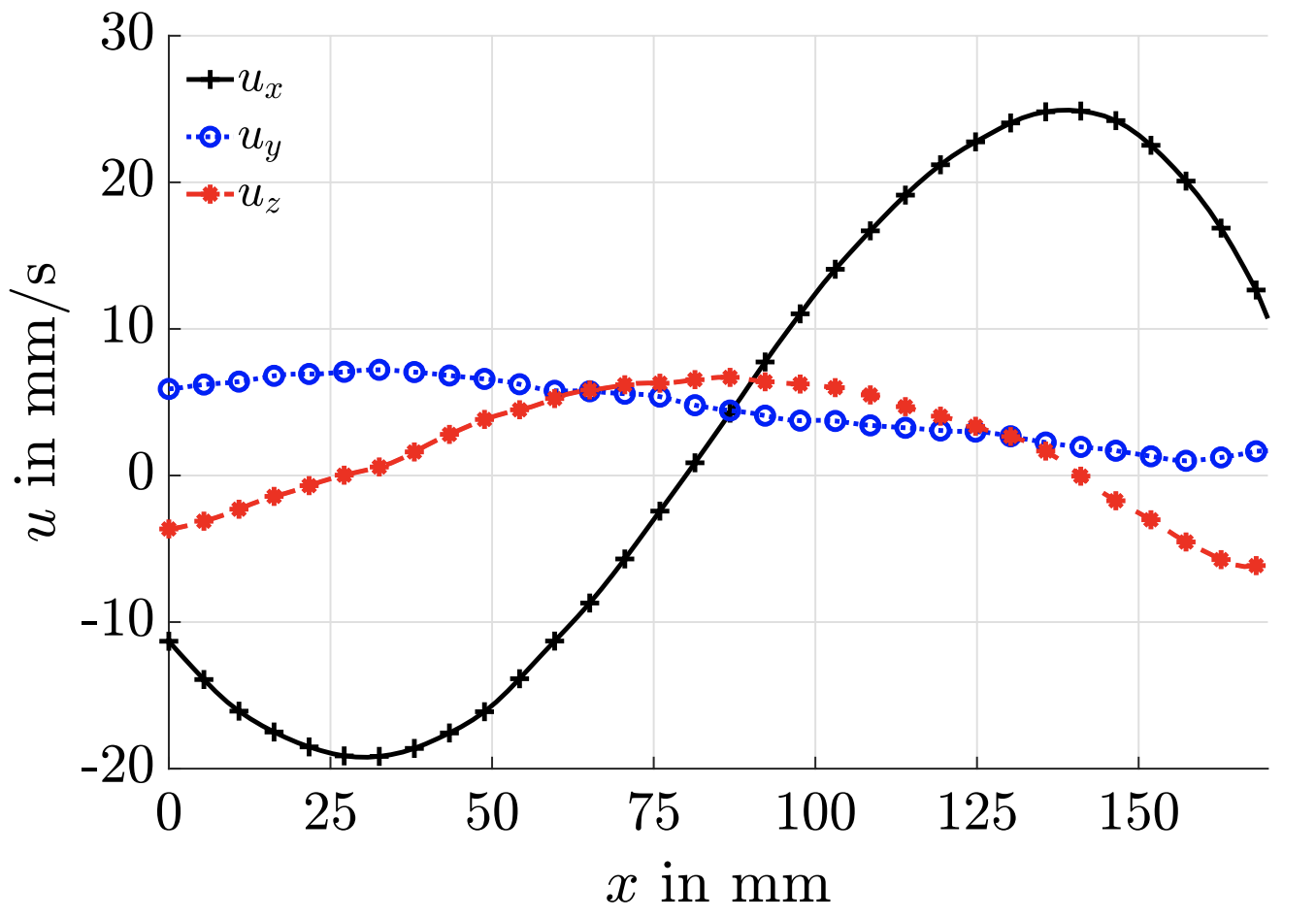
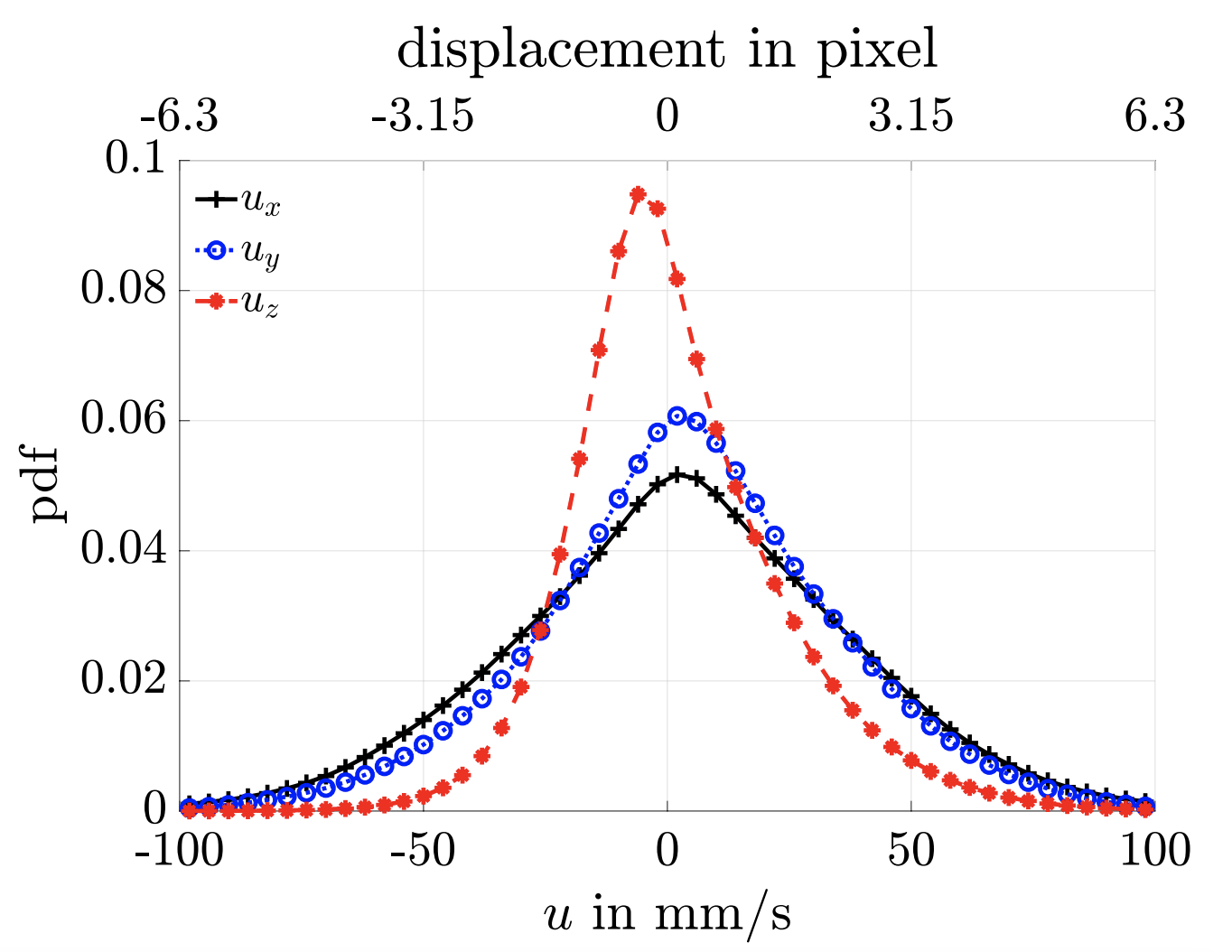
Exp3: Stereoscopic PIV on free jet
- A pump is used to create the free jet right towards the camera plane
Dark ribbon phenomenon
- Rolling Shutter Mechanism

Dark ribbon phenomenon
- Difference between light source pulse frequency and camera frame rate